 |
Gießereitechnik
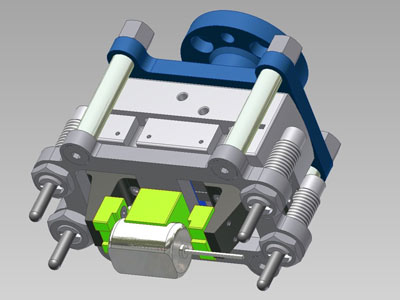
Abnahme von Spritzguss- und Aluminiumgussteilen von der Spritzgießpresse.
Der Greifer dient zur Abnahme von Aluminiumgussteilen mit einer Temperatur von 300 °C von der Druckpresse. Mit Rücksicht auf die anschließende Kühlung der gehandhabten Produkte wurde der Greifer komplett aus Edelstahl hergestellt. Wegen hoher Temperaturen werden die Druckluftleitungen zur Steuerung der Backen im Greifergehäuse integriert.
In der Konstruktion wurde ein standardisierter Drei-Punkt--Greiferkopf von der Firma Schunk verwendet. Der Greifer selbst wird an einen 6-Achs-Roboter ABB IRB 6640 angebracht.
|
 |
Fahrzeugindustrie
Handhabung der 30-kg-Kegel mit Pulverpolymer.
Der Greifer wird zur Handhabung der Duralkegel mit Pulverpolymer konstruiert und ausgelegt. Das Maximalgewicht des Kegels beträgt 30 kg.
Der Greifer ist mit einem Sensor für das Vorhandensein des Kegels und einem Ultraschall-Näherungssensor ausgestattet.
In der Konstruktion wird ein Parallelgreifer von der Firma Schunk verwendet. Der Greifer wird von einem 6-Achs-Roboter ABB IRB 6600 gesteuert.
|
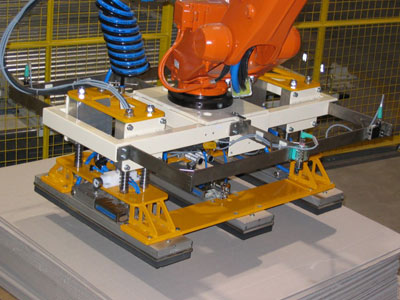 |
Papierindustrie
Handhabung von Europaletten und Kartons.
Der Greifer dient zur Handhabung von Europaletten aus Holz und Kartons. Das Grundelement des Greifers sind drei breite Sauger, die über eine federnde Lagerung mit einem Stahlrahmen verbunden sind.
Der Greifer ist mit optischen Sensoren zur Identifizierung des Vorhandenseins der Palette oder des Kartons und Ultraschall-Näherungssensoren ausgestattet, die den Roboter über den Abstand vom Produkt bei der Annäherung informieren.
Der Greifer wurde für den Palettier-Roboter ABB IRB 660 gebaut.
|
 |
Fahrzeugindustrie
Montage der Fahrzeugkomponenten.
Der Greifer wird an einer Montagestelle verwendet, an der der Roboter in eine bestimmte Baugruppe eine weitere Komponente, in diesem Fall einen Elektromotor, montiert. Der Greifer musste strenge Anforderungen an Genauigkeit und niedriges Gewicht erfüllen. Gleichzeitig musste das Problem mit den Magnetkräften der kleinen Motoren gelöst werden, denn sie haben bei der Abnahme von der Palette aneinander „geklebt“.
In der Konstruktion wird ein Parallelgreifer von der Firma Festo verwendet, der Greifer wird speziell für den Roboter ABB IRB 140 gebaut.
|
 |
Lebensmittelindustrie
Handhabung von Tüten mit Lebensmittelprodukten.
Der Greifer zeichnet sich durch eine einfache Bauweise aus und dient zur Handhabung von Plastiktüten. Im Auftrag wurden das Gewicht und die mechanische Widerstandsfähigkeit betont. Der Greifer ist mit Saugern mit Faltenbalg von der Firma Piab ausgestattet.
Der Greifer wurde für den Roboter ABB FlexPicker IRB 360 gebaut.
|







